Ryan Chan
Robot Pup
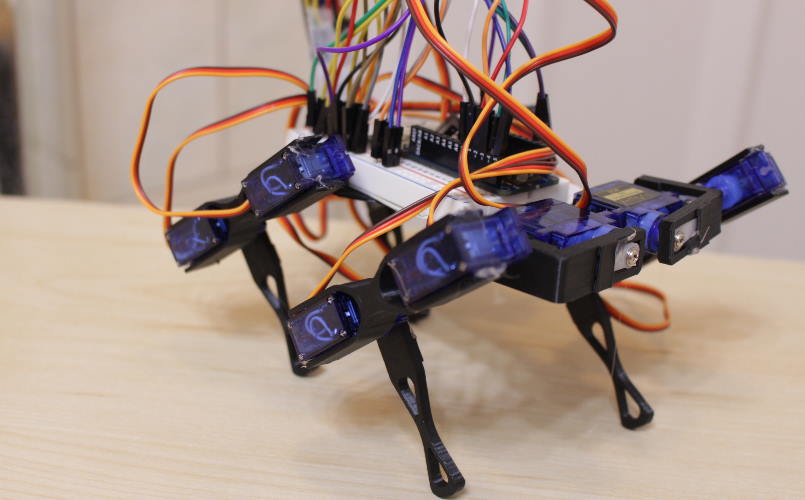
To keep myself busy over this Winter Break and to deepen my skills in robotics,
I decided to attempt to build an IoT robotic dog that can be controlled through a smartphone to walk and turn using four robotic legs.
I designed, modelled, and 3D printed the parts using Autodesk Fusion 360, used an ESP32 microcontroller to control the robot,
and programmed it using Arduino C. It is also IoT enabled using Blynk. There are 10 micro-servos used to move the robot: 2 servos
for each of the back legs and 3 servos for each of the front legs.
The additional front leg servos are used for turning and possibly balancing the robot with the help of a gyroscope.
Video
Progress
This project is still in progress. Currently, I've completely finished modelling and 3D printing the structure and finished most of the wiring as well as a large portion of the software. I still have to figure out how to power it since I don't have any batteries that can supply enough power, so I currently have to tether the robot to a power supply.